RobotSim 使用教點式模擬
- 如操作過程有問題,可參考 RobotSim基礎)
選用設備
- 機械手臂 : KUKA KR60-L45-3手臂unitypackage
- 負載重量 : 45kg
- 工作範圍 : 2230cm
- 夾爪 : RGN+300-1夾爪模型
RobotSim建置作業環境
- 加入機械手臂KUKA KR60-L45-3、夾爪RGN+300-1
-
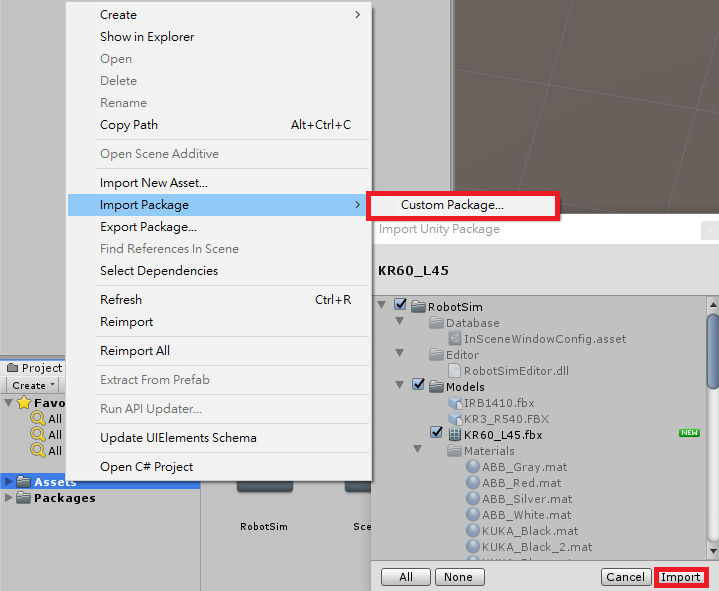
將手臂模型匯入RobotSim
-
加入機械手臂
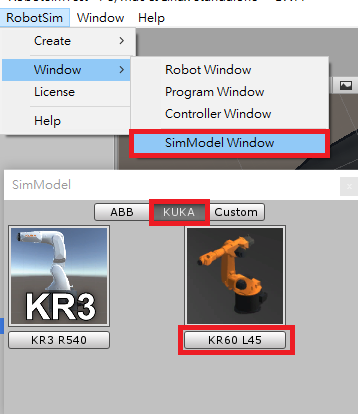
-
加入夾爪模型
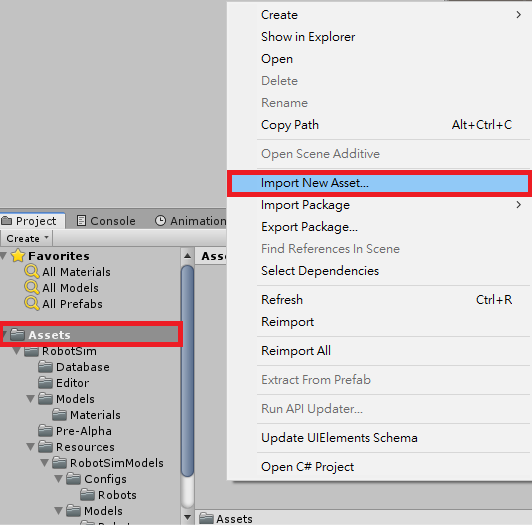
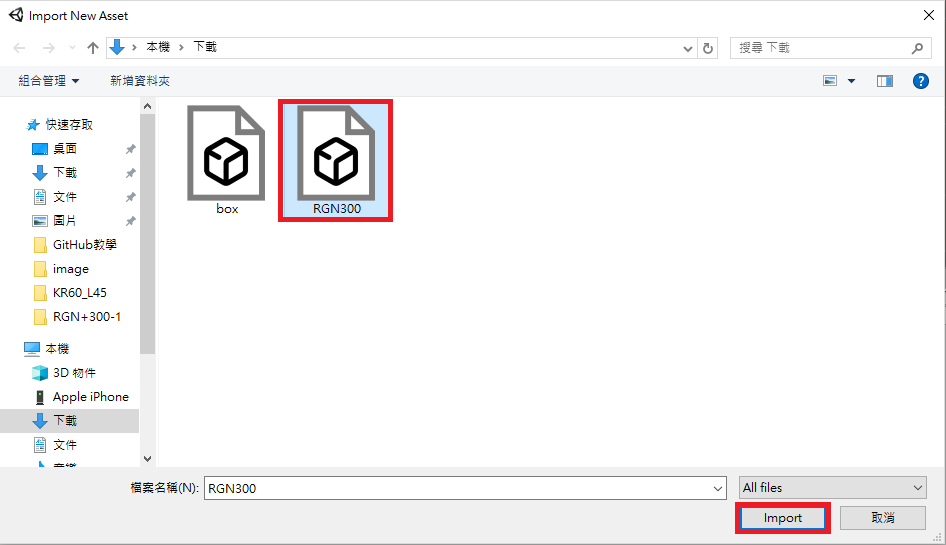
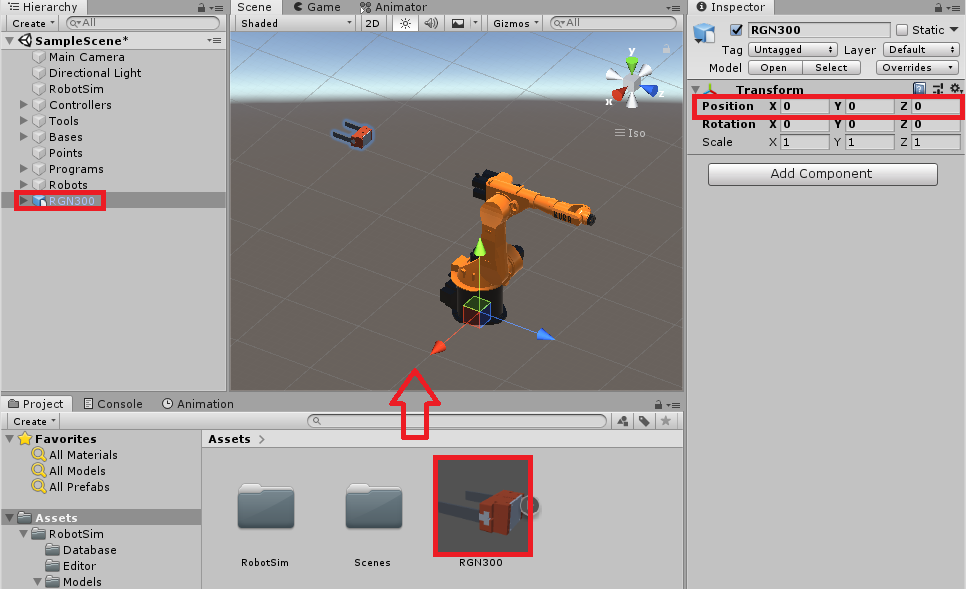
- 左方SampleScene列表找到RNG300
- 將夾爪RGN300拖移到場景上,並且把位置 (Position) 設為原點 (X 0, Y 0, Z 0)
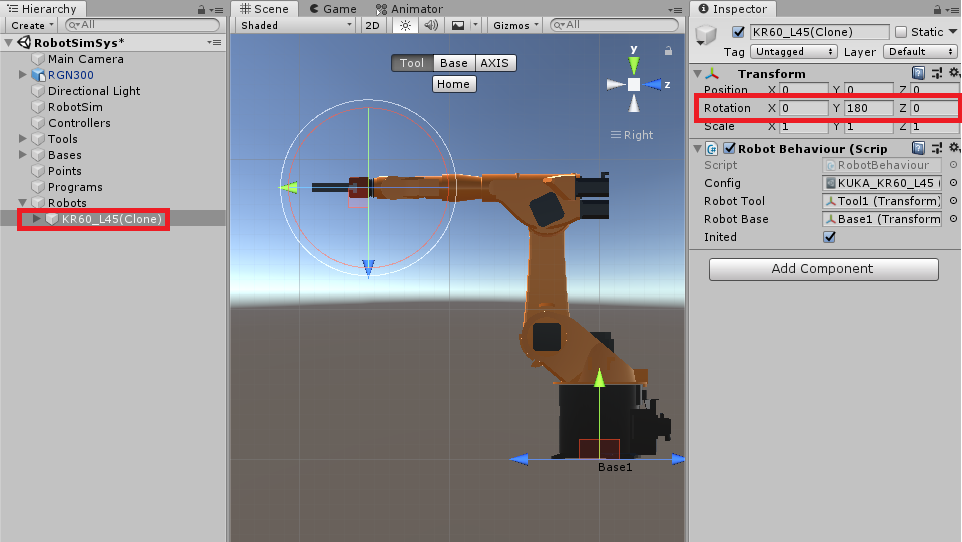
- 將手臂對手臂底座的Y軸(Unity)旋轉180度,讓法蘭面對準夾爪
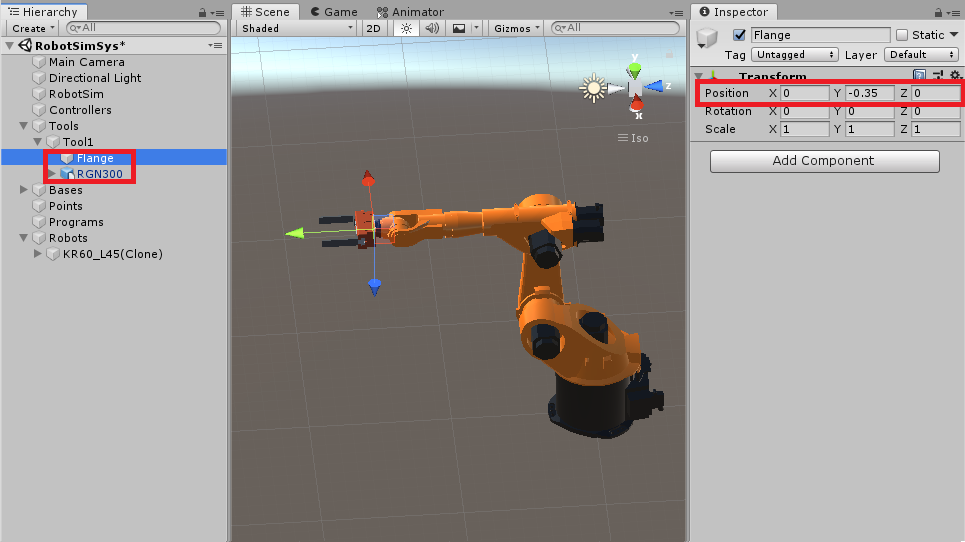
- 將左方列表RNG300物件拉至Tool1裡,並且將Flange位置Y設為 -0.35m,這樣即能讓手臂至夾爪前端中心重疊
-
-
建立手臂作業空間以及極限範圍示意模型
-
移動手臂時較方便目測極限距離
-
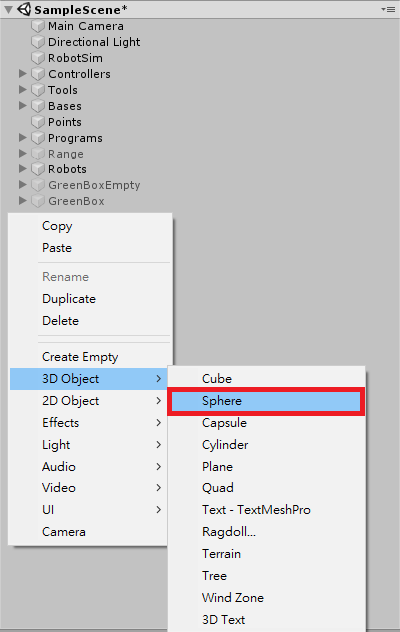
建立球形3D物件
- 設定物件大小規模 (Scale)
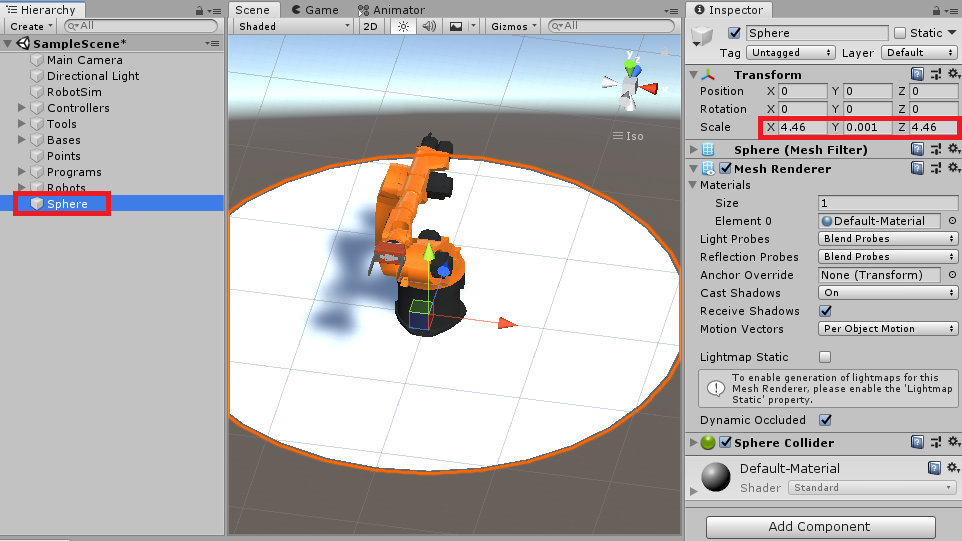
- 設定範圍單位為 公尺(m)
- 例 : 手臂作業範圍2.23m,須設定圓直徑為4.46m
- 設定物件顏色
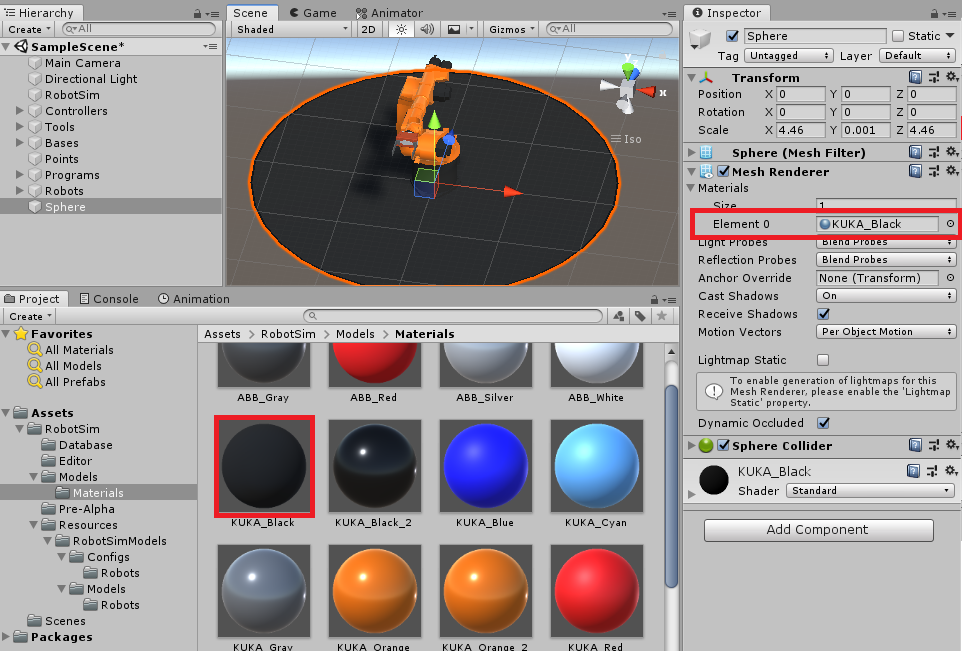
- 選擇Materials材質,拖移至Element欄位
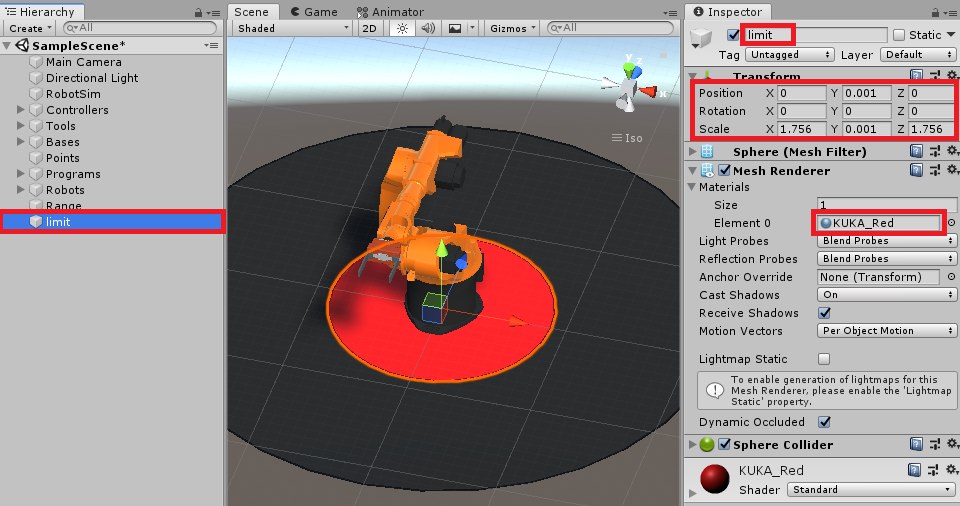
- 使用相同方法建立手臂內圈極限範圍
-
-
建立工作空間範圍
- 手臂在空間中可工作的範圍
-
PS. 可用來觀察手臂運動中有無超越或撞機風險
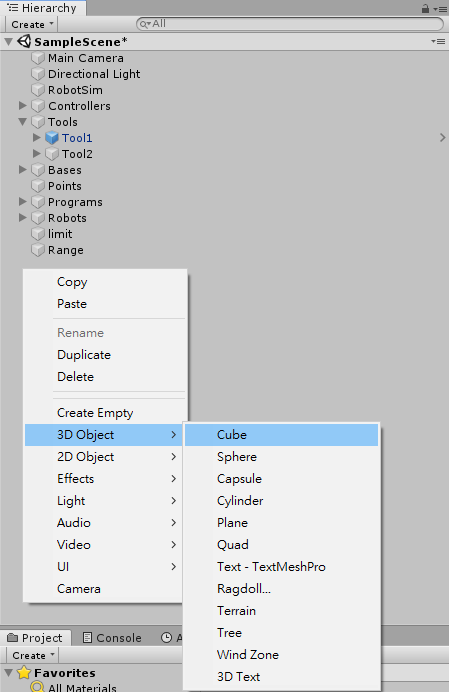
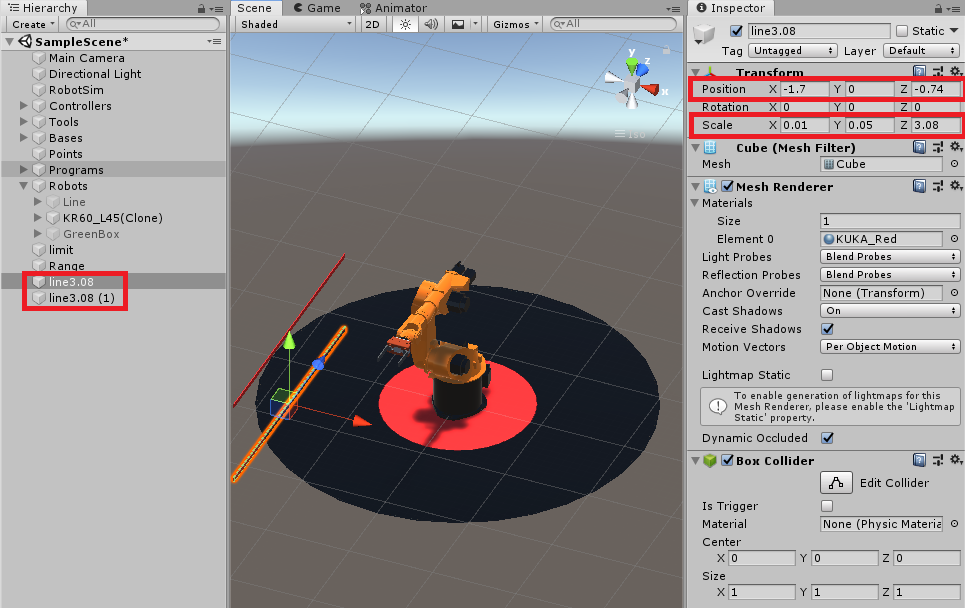
- 將Cube改名為Line並設定線的長寬高、位置等等…
- 第二條線只需要複製並調整位置即可
- 位置參數為物件的中心,如要調整參數須注意
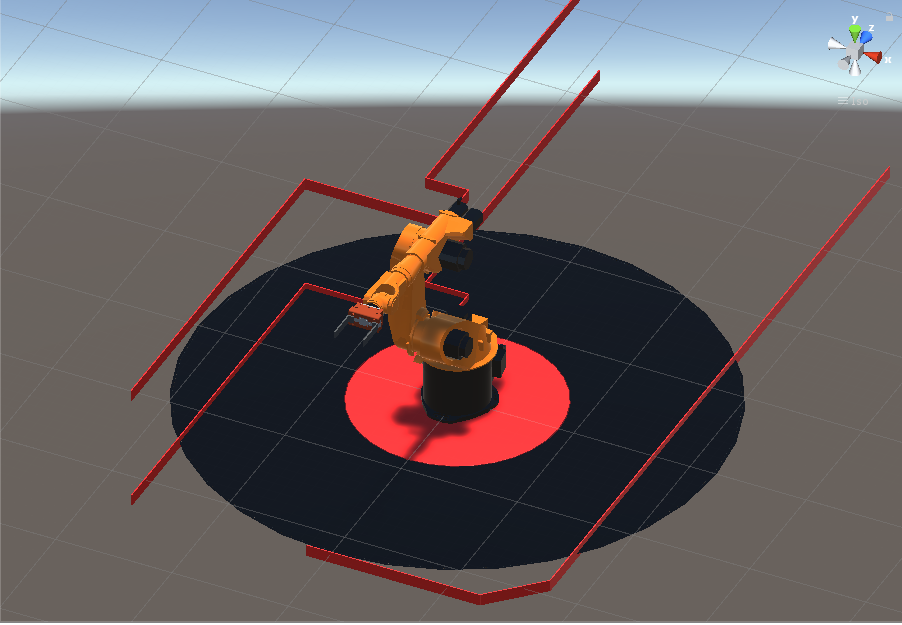
- 設定完成後場景
-
建立其他專案所需物件
- 視各專案模擬所需使用其他物件
-
箱子模型 長42CM 寬29CM 高15CM
-
擺放物件方式
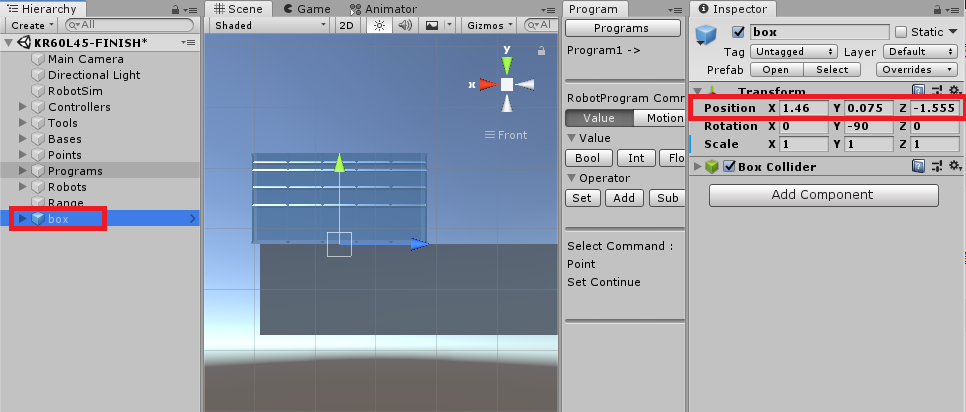
- 利用位置 (Position) 參數放置物體實際位置,單位均為公尺(m)
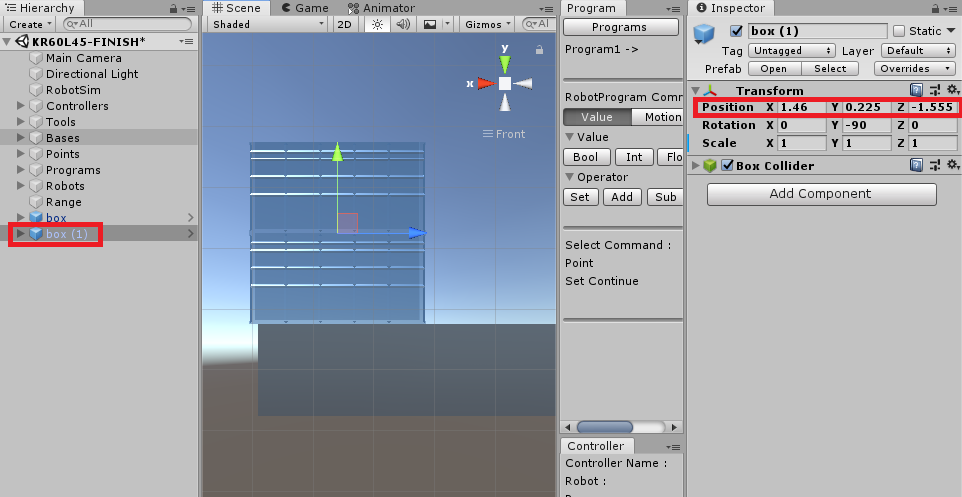
- 如需要堆疊多個箱子,只需要先設定好第一個箱子位置,其餘則使用複製並更改其位置參數Y,向上移動盒子高度15CM
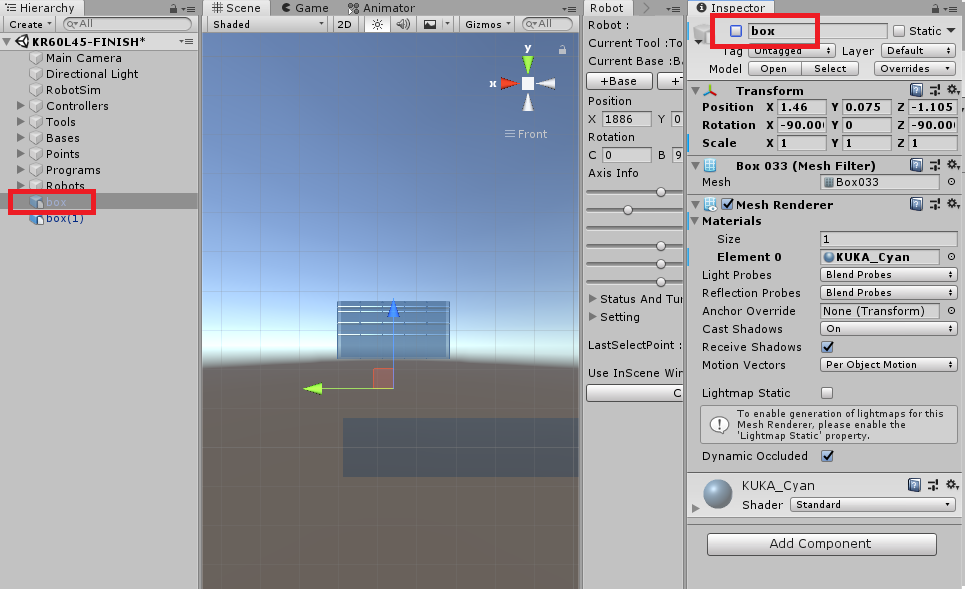
- 選擇物件,右上角取消勾選即能將物件取消不使用,但還是能保有物件設定,需要使用時再勾選即可
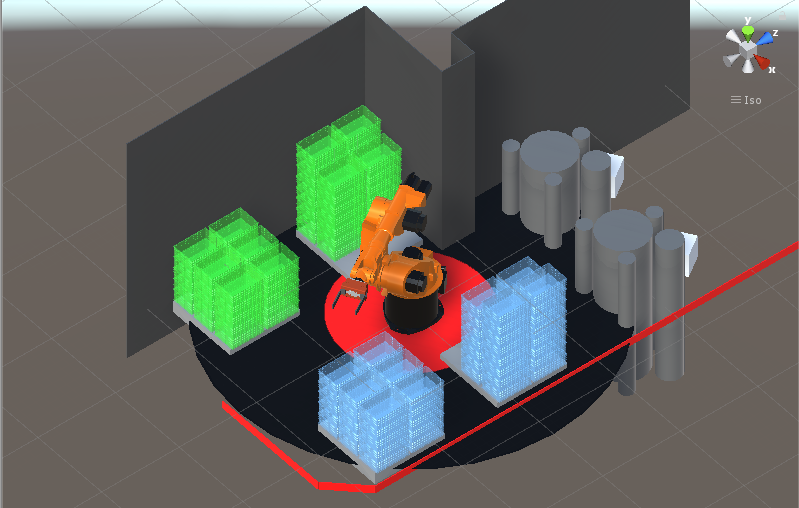
- 本專案經模擬後,手臂擺放位置更改成旋轉(Rotation)Y 150,此角度下手臂的工作路徑相對較順暢
點位記錄及模擬實作
-
紀錄手臂點位
-
使用位置參數設定點位
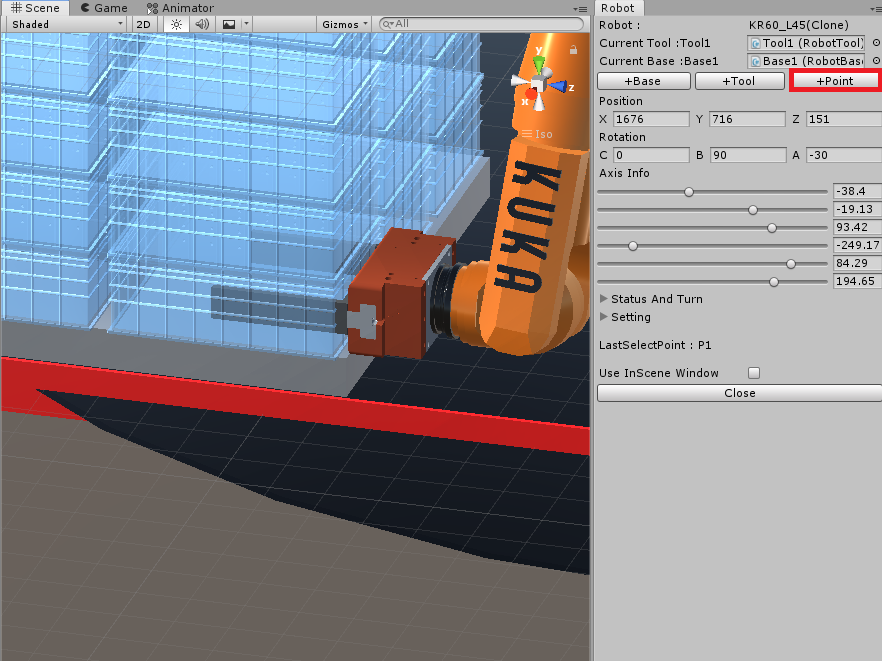
- 將手臂移動至物件夾取位置
- 使用 [+Point] 功能紀錄點位
- 記錄完第一點後,其他點只需要使用複製方式,並更改其位置參數(物件box高為15cm,每層點位位置Y相差0.15m)
-
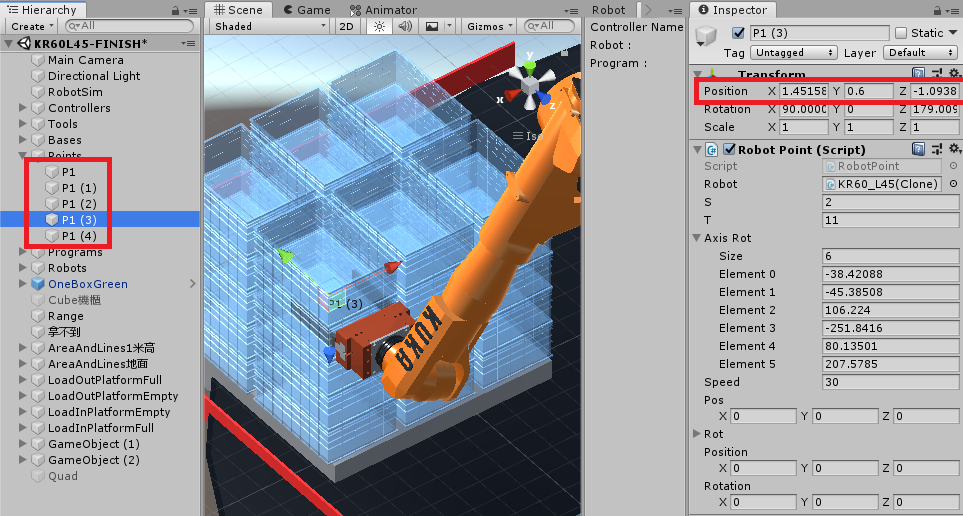
利用空物件進行分類幫助分類不同點位
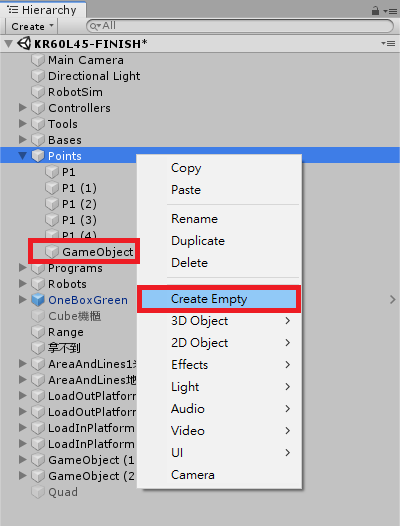
- 創立一個空的物件GameObject
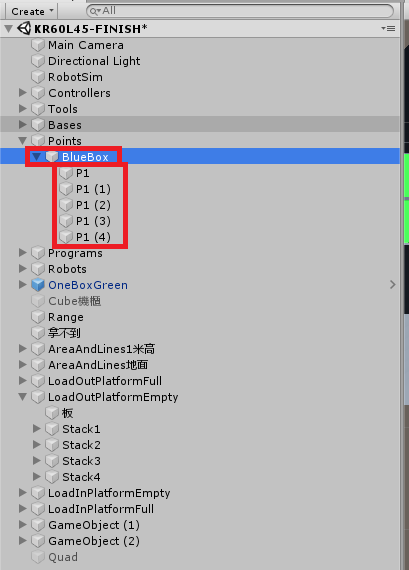
- 將物件名稱更改為所分類名稱BlueBox
- 將點位P1至P1(4)拖移至空物件裡面
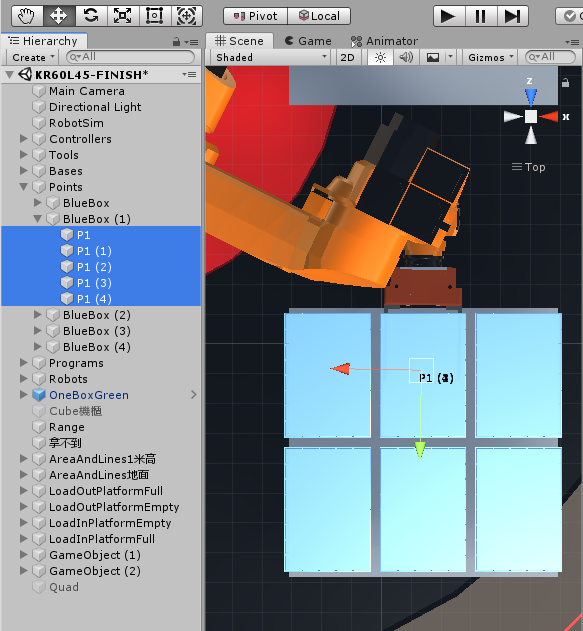
- 另外6疊只需複製現有BlueBox,選取裡面P1至P1(4)點位直接移動位置
-
-
將點位連接成動作
-
使用Program編輯流程
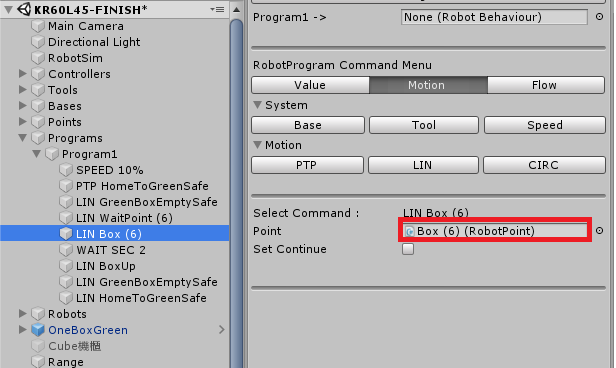
- 選取動作型態(motion tyoe),將點位置入,並做好作動順序安排,執行時即可讓手臂順利移置點位
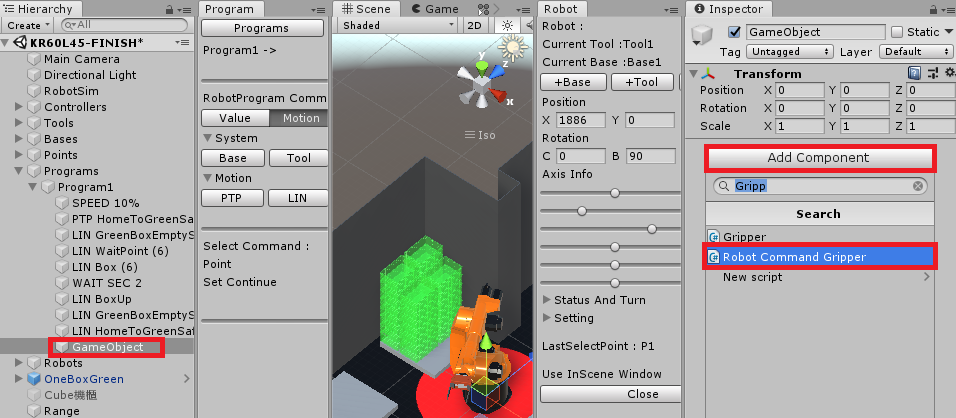
- 使須夾取物件能夠被夾爪所夾取
- 詳細步驟請參考RobotSim專案製作
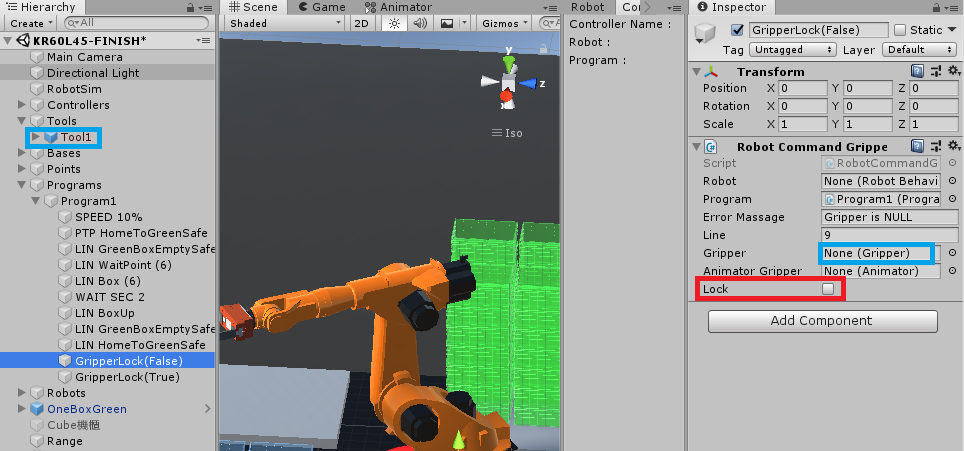
- 將手臂Tool1拖移至Gripper,建立一個使用Tool1為工具的物件
- 下方Lock勾選為夾取物件(True):GripperLock(True)(False):GriperLock、反之取消勾選為放下物件(False)
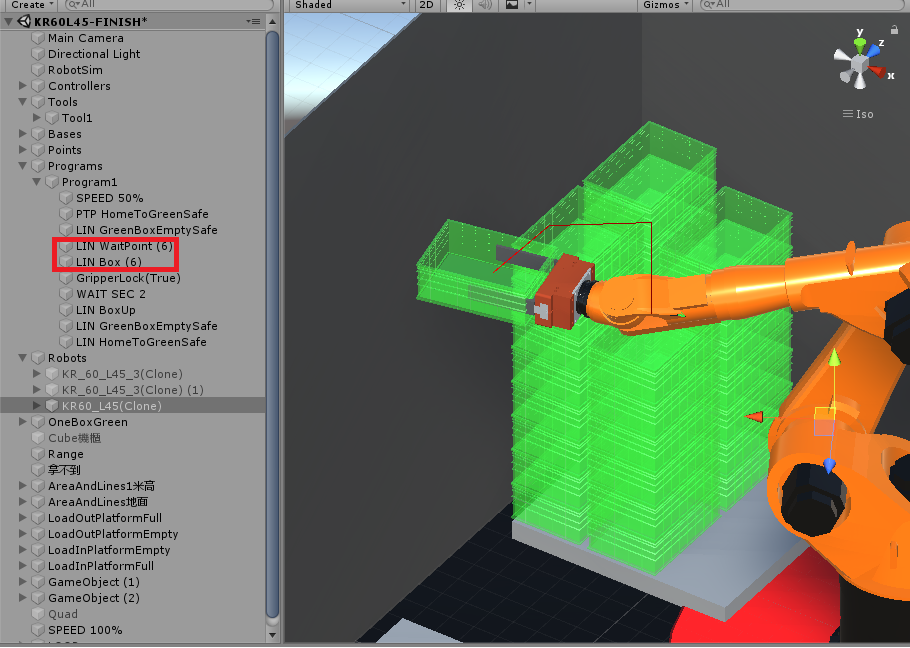
- 將GripperLock(True)設定在到達夾取物件點位
- 將GriperLock(False)設定到達預放置物件點位
-